西门子6ES7 860-1AA10-0YX0
SIEMENS西门子上海朕锌电气设备有限公司
联系人:钟涛(销售经理)
24小时销售及维修热线:18221357245
电 话:021-67226033
传 真:021-31663452
手 机:18221357245
Q Q : 1824547528
地址:上海市金山区枫湾路500号
《销售态度》:质量保证、诚信服务、及时到位!
《销售宗旨》:为客户创造价值是我们**追求的目标!
《产品质量》:原装正品,全新原装!
《产品优势》:专业销售 薄利多销 信誉好,口碑好,价格低,货期短,大量现货,服务周到!
1. SIWAREX MS称重模块简介
SIWAREX MS称重模块集成在SIMATIC S7-200系统中,主要特征如下:
- 利用STEP 7 MicroWin版本4.0 SP2及更高版本进行配置;
- 分辩率高达16位的重量测量或力的测量;
- 精度0.05 %;
- 可以在20 ms或33 ms之间选择的快速测量时间;
- 使用SIWATOOL MS软件,通过RS 232接口很容易地实现校秤;
- 允许理论校秤;
- 更换模块后无需重新校订,只需重新下载校秤数据即可;
- 适用于1类防爆区域的本质安全称重传感器电源(SIWAREX IS选项);
- 诊断功能。
2. 设备及软件列表
该实验中用到的硬件和软件如下:
| 设备名称 | 订货号 | 数量 |
| CPU224 DC/DC/DC | 214-1AD21-0xB0 | 1 |
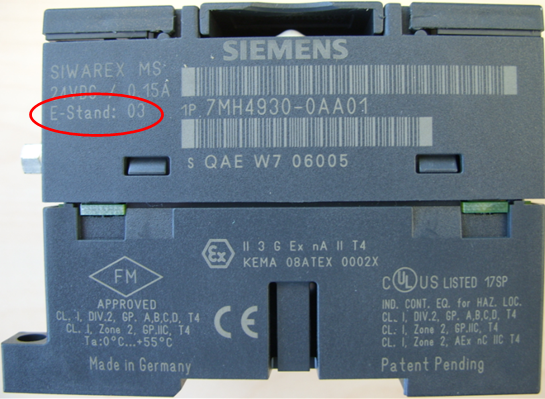
| SIWAREX MS称重模块 | 7MH4930-0AA01 | 1 |
| 称重传感器 | 7MH4103-3AC01 | 1 |
| PC/PPI 电缆 | 6ES7 901-3BF20-0xA0 | 1 |
| 或6ES7 901-3DB30-0xA0 | ||
| SIWATOOL连接电缆(可选) | 7MH4 702-8CA | 1 |
| 屏蔽连接端子 | 6ES5 728-8MA11 | 1 |
| 软件 | 说明 |
| STEP7 Micro/Win | 4.0 SP2及更高版本 |
| 配置软件包 | 包含Micro/Win程序库、SIWATOOL MS软件及使用手册 |
3. 添加称重库指令
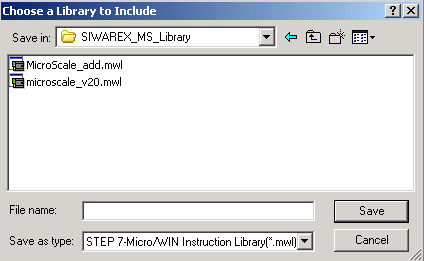
添加库文件,步骤如下:
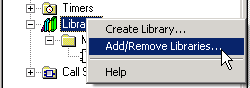
选择要添加的两个库文件,如下图所示:
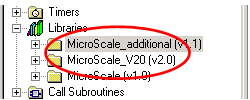
已经添加的两个库文件如下所示:
建议**次使用西门子称重模块的用户到下列网站下载上述库文件和相应例子程序:
http://www.ad.siemens.com.cn/download/DocList.aspx?TypeId=5&CatFirst=36&CatSecond=-1&CatThird=-1
4. 库文件参数说明
4.1 MicroScale_V20参数说明
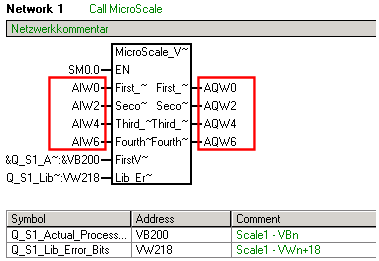
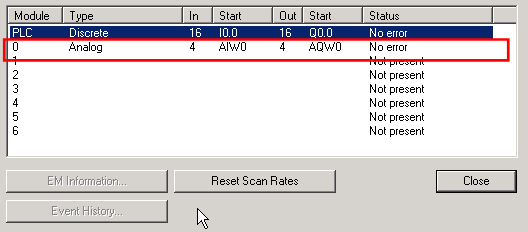
一个SIWAREX MS需要占用PLC200的4个模拟量输入和4个模拟量输出,其地址通过参数“First_AIW、Second_AIW、Third_AIW、Fourth_AIW”及“First_AQW、Second_AQW、Third_AQW、Fourth_AQW”指定,该地址可以通过下列方式获取:
从下图可以看出,在该例子程序中称重模块输入和输出的起始地址分别为AIW0和AQW0
FirstVB_Pointer:每个称重模块要占用PLC的V区内的20个字节来存储相关的参数,该区域的始地址由“FirstVB_POINTER”指定, 如&VB200,那么重量存储在VW202中,其他字节的含义请参考SIWAREX MS使用手册。
Lib_Error:称重模块的故障代码,它已经包含在上述20字节中,其地址为FirstVB_POINTER+18,如果FirstVB_POINTER为200,则Lib_Error对应地址为VW218
4.2 MicroScale_additional说明
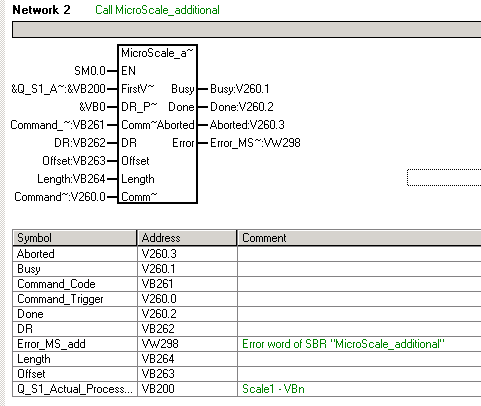
FirstVB:与MicroScale功能块的FirstVB_POINTER地址相同;
DR_Point:在称重模块内部参数以数据记录DR的方式存储,例子程序中已经建立了这些数据记录,如下图所示:
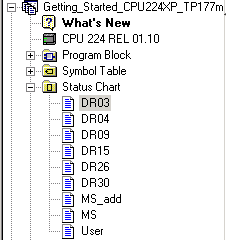
这些数据记录占用V区186个字节,起始地址通过DR_Point指定。
Command_Code:命令代码
DR: 要读或写的数据记录的编号,如DR3
Offset:要访问的数据在数据记录中的偏移量
Length:要访问的数据长度,以byte为单位
Command_Trigger:命令触发,与Command_Code配合使用,执行某个命令;
注意: 如果Offset和Length同时为0,则表示对整个数据记录进行操作;
5. 如何设定砝码重量、小数点个数、传感器特征值、量程、重量单位等
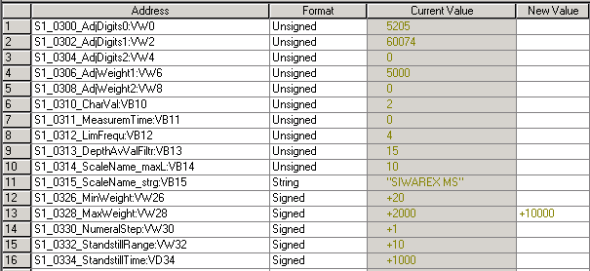
以修改标定砝码重量为例进行说明:
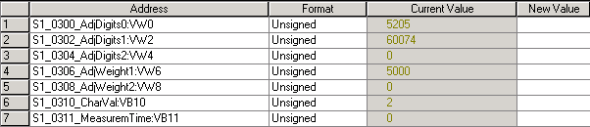
(1) 在状态表DR3中找到砝码重量对应的变量VW6,然后写入砝码重量
由于在SIWAREX MS内部,重量通过一个Word进行存储,那么砝码重量与小数点位数有关。称重模块默认显示两位小数,如果砝码50kg,则需要写入5000;如果没有小数点,则输入50即可
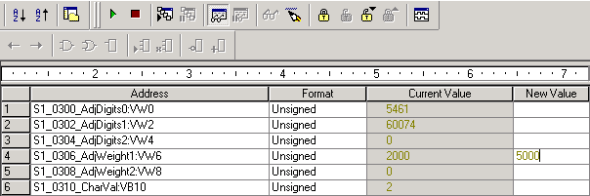
这样就把砝码重量50.00kg写入PLC中;
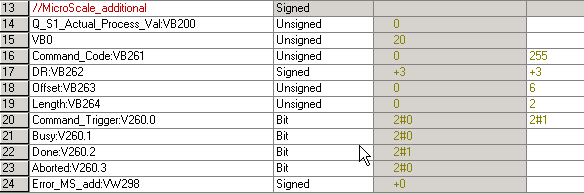
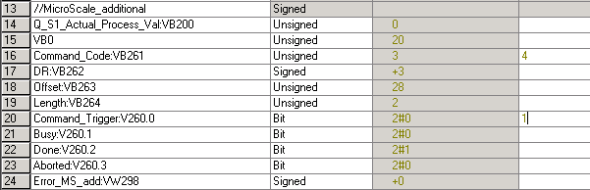
(2)将PLC中的砝码重量通过命令255写入称重模块,DR、Offset和Length分别为3、6和2,如下图所示。Command_Trigger设置为1,命令执行。
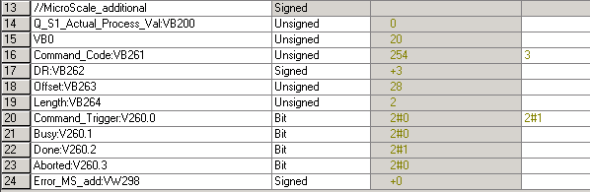
(3)通过读数据记录命令254,查看数据是否已经写入称重模块,如下图所示。
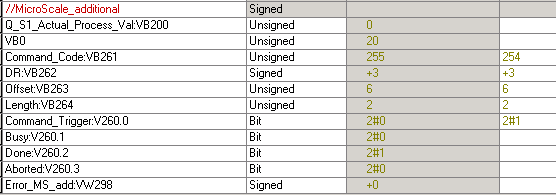
此时DR3的VW6已经为5000,即50.00kg
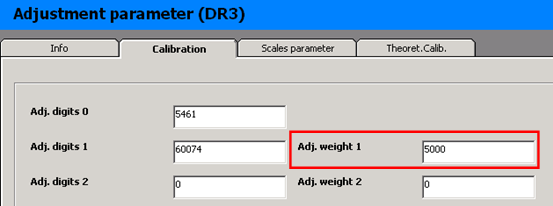
通过SIWATOOL MS软件也可以看到此时已经修改成功。
修改其他参数,如量程,只需要在DR3的VW28中输入量程,如10000,即100.00kg。
MicroScale_additional的Offset和Length改为28和2,其他操作同上。
6. 零点标定
将秤体清空,执行零点标定,重量显示变为0kg
此时重量VW202变为0kg,如下所示
![]()
此时在SIWATOOL MS中也可以看到,重量已经变为0kg,如下图所示:

7. 砝码标定
把50kg的砝码放在秤体上,然后执行命令4,如下图所示:
SIEMENS西门子上海朕锌电气设备有限公司
联系人:钟涛(销售经理)
24小时销售及维修热线:18221357245
电 话:021-67226033
传 真:021-31663452
手 机:18221357245
Q Q : 1824547528
地址:上海市金山区枫湾路500号
1.1光电编码器
编码器是传感器的一种,主要用来检测机械运动的速度、位置、角度、距离和计数等,许多马达控制均需配备编码器以供马达控制器作为换相、速度及位置的检出等,应用范围相当广泛。按照不同的分类方法,编码器可以分为以下几种类型:
Ø 根据检测原理,可分为光学式、磁电式、感应式和电容式。
Ø 根据输出信号形式,可以分为模拟量编码器、数字量编码器。
Ø 根据编码器方式,分为增量式编码器、**式编码器和混合式编码器。
光电编码器是集光、机、电技术于一体的数字化传感器,主要利用光栅衍射的原理来实现位移——数字变换,通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。典型的光电编码器由码盘、检测光栅、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。光电编码器具有结构简单、精度高、寿命长等优点,广泛应用于精密定位、速度、长度、加速度、振动等方面。
这里我们主要介绍SIMATIC S7系列高速计数产品普遍支持的增量式编码器和**式编码器。
1.2增量式编码器
增量式编码器提供了一种对连续位移量离散化、增量化以及位移变化(速度)的传感方法。增量式编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,它能够产生与位移增量等值的脉冲信号。增量式编码器测量的是相对于某个基准点的相对位置增量,而不能够直接检测出**位置信息。
如图1-1 所示,增量式编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成。在码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期。检测光栅上刻有A、B 两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线,它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4 节距,使得光电检测器件输出的信号在相位上相差 90°。当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差 90°的近似于正弦波的电信号,电信号经过转换电路的信号处理,就可以得到被测轴的转角或速度信息。
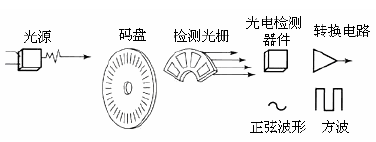
图1-1 增量式编码器原理图
一般来说,增量式光电编码器输出 A、B 两相相位差为 90°的脉冲信号(即所谓的两相正交输出信号),根据 A、B 两相的先后位置关系,可以方便地判断出编码器的旋转方向。另外,码盘一般还提供用作参考零位的 N 相标志(指示)脉冲信号,码盘每旋转一周,会发出一个零位标志信号。
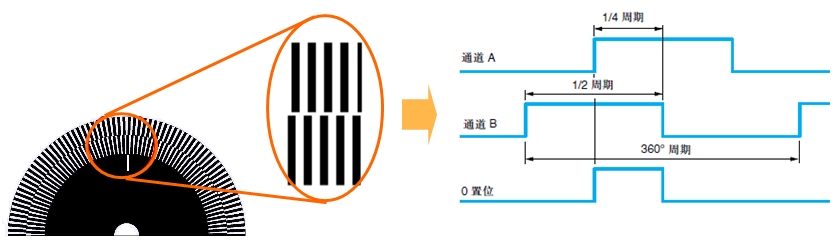
图1-2 增量式编码器输出信号
1.3**式编码器
**式编码器的原理及组成部件与增量式编码器基本相同,与增量式编码器不同的是,**式编码器用不同的数码来指示每个不同的增量位置,它是一种直接输出数字量的传感器。
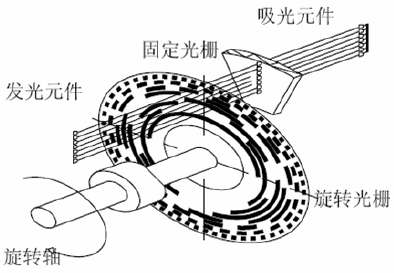
图1-3**式编码器原理图
如图1-3所示,**式编码器的圆形码盘上沿径向有若干同心码道,每条码道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数。在码盘的一侧是光源,另一侧对应每一码道有一光敏元件。当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。显然,码道越多,分辨率就越高,对于一个具有 n 位二进制分辨率的编码器,其码盘必须有 n 条码道。
根据编码方式的不同,**式编码器的两种类型码盘(二进制码盘和格雷码码盘),如图1-4 所示。
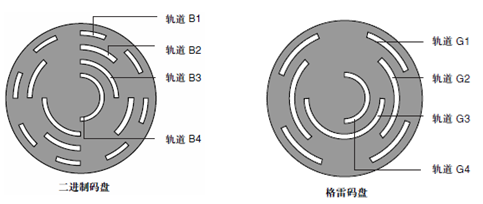
图1-4 **式编码器码盘
**式编码器的特点是不需要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码,即直接读出角度坐标的**值。另外,相对于增量式编码器,**式编码器不存在累积误差,并且当电源切除后位置信息也不会丢失。
2 编码器输出信号类型
一般情况下,从编码器的光电检测器件获取的信号电平较低,波形也不规则,不能直接用于控制、信号处理和远距离传输,所以在编码器内还需要对信号进行放大、整形等处理。经过处理的输出信号一般近似于正弦波或矩形波,因为矩形波输出信号容易进行数字处理,所以在控制系统中应用比较广泛。
增量式光电编码器的信号输出有集电极开路输出、电压输出、线驱动输出和推挽式输出等多种信号形式。
2.1集电极开路输出
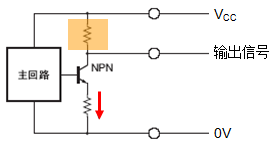
集电极开路输出是以输出电路的晶体管发射极作为公共端,并且集电极悬空的输出电路。根据使用的晶体管类型不同,可以分为NPN集电极开路输出(也称作漏型输出,当逻辑 1 时输出电压为 0V,如图2-1所示)和PNP集电极开路输出(也称作源型输出,当逻辑 1 时,输出电压为电源电压,如图2-2所示)两种形式。在编码器供电电压和信号接受装置的电压不一致的情况下可以使用这种类型的输出电路。
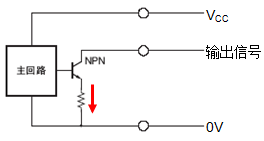
图2-1 NPN 集电极开路输出
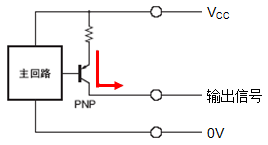
图2-2 PNP集电极开路输出
对于PNP型的集电极开路输出的编码器信号,可以接入到漏型输入的模块中,具体的接线原理如图2-3所示。
注意:PNP型的集电极开路输出的编码器信号不能直接接入源型输入的模块中。
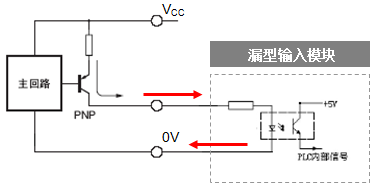
图2-3 PNP型输出的接线原理
对于NPN型的集电极开路输出的编码器信号,可以接入到源型输入的模块中,具体的接线原理如图2-4所示。
注意:NPN型的集电极开路输出的编码器信号不能直接接入漏型输入的模块中。
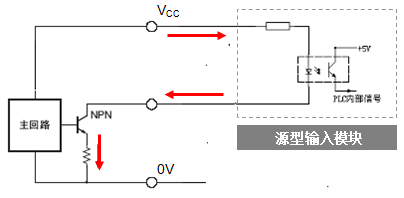
图2-4 NPN型输出的接线原理
2.2 电压输出型
电压输出是在集电极开路输出电路的基础上,在电源和集电极之间接了一个上拉电阻,这样就使得集电极和电源之间能有了一个稳定的电压状态,如图2-5。一般在编码器供电电压和信号接受装置的电压一致的情况下使用这种类型的输出电路。